|
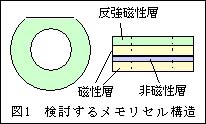
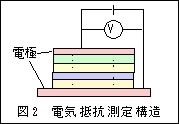
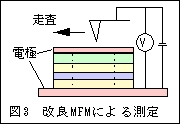
ヒューマノイドロボット、マイクロマシンなどを含むあらゆる知的人工物の制御に用いられる次世代機能デバイスとして、超高集積磁性メモリ素子の研究を進める。知的人工物は、それ自身が自立的に制御されなくてはならず、そのためには大量の情報を処理し、格納しなければならない。この情報は、電源の一時的な遮断が生じても失われてはならず、また、知的人工物は宇宙空間などの特種環境で行動することから、耐放射線特性、耐衝撃性などに優れた情報記憶メモリ素子を開発する必要がある。さらには、低消費電力、高速機能などの特性も重要な要素である。上記のような特性に優れるメモリとして、磁性材料の磁化の向きを記憶単位とする磁性メモリの研究が、国内外で盛んに行われている。現在、磁性メモリ素子を実用化する際の問題としては、超高密度実装および低消費電力の特性が考えられる。本研究者等は、超高密度実装化および低消費電力化を実現する最も有力な方法として、磁化環流型メモリ構造を考案し、その実用化への課題を抽出、実用化への要素技術を確立することを目的として研究を行ってきた。2003年度には、リング形状の一部を磁束を通しにくい構造とすることにより、面内磁界の向きにより、磁化の向きを「時計回り」と「反時計回り」との間で制御可能なことを実験的・理論的に明らかにした。2004年度は、さらに、(1)情報の読み出しに必要な磁化の向きの固定された磁性層の形成方法の確立、(2)電気抵抗率変化の検出による情報の読み出しの検討を行う。
|